Rappels d'algèbre linéaire
Vecteurs et matrices
Vecteurs
Un vecteur
Le produit scalaire entre deux vecteurs
La norme euclidienne est
Deux vecteurs sont orthogonaux si
Matrices
Une matrice
- Transposée :
- Produit matriciel :
- Trace :
(matrices carrées) - Déterminant :
(matrices carrées)
Propriétés du produit :
(associativité) - En général,
(non-commutatif)
Matrices particulières
| Type | Définition | Propriétés |
|---|---|---|
| Symétrique | Valeurs propres réelles | |
| Orthogonale | Préserve les normes | |
| Diagonale | ||
| Identité |
Transformations linéaires
Une matrice
L'image du cercle unité par différentes matrices illustre la nature géométrique des transformations linéaires :
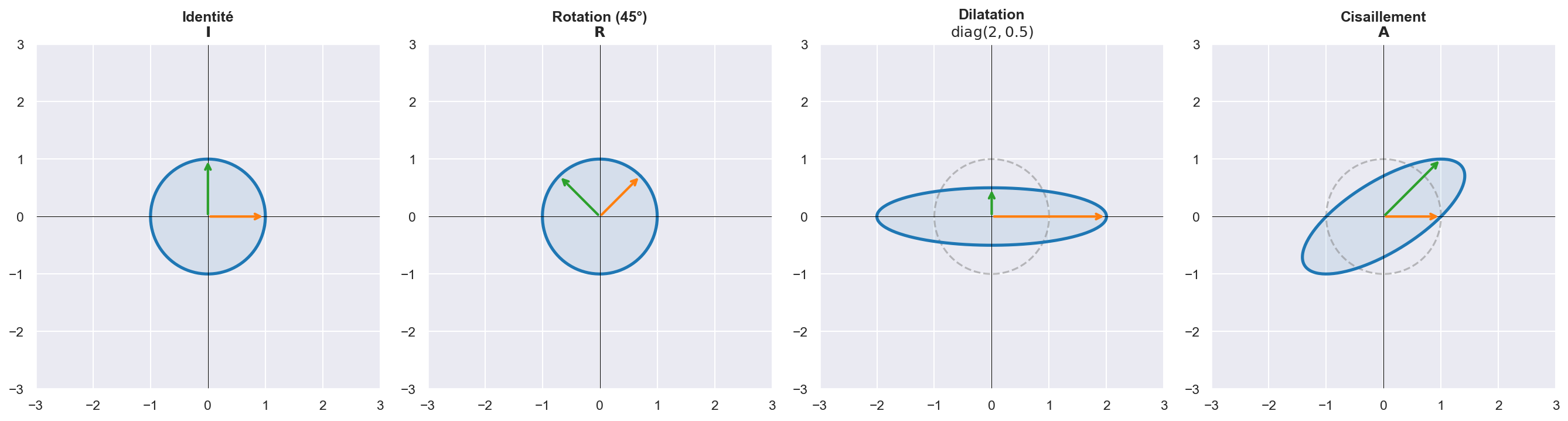
Figure 1 : Image du cercle unité par différentes transformations linéaires
Systèmes linéaires et inverse
Inverse d'une matrice
Une matrice carrée
Propriétés :
Résolution de systèmes linéaires
Le système
- Une solution unique si
est inversible : - Une infinité de solutions si le système est sous-déterminé (
) - Aucune solution exacte si le système est sur-déterminé (
), ce qui conduit à la notion de moindres carrés
Valeurs propres et vecteurs propres
Définition
Un scalaire
Les valeurs propres sont les racines du polynôme caractéristique
Diagonalisation
Si
où
Pour une matrice symétrique
- Toutes les valeurs propres sont réelles
- Les vecteurs propres sont orthogonaux :
avec orthogonale
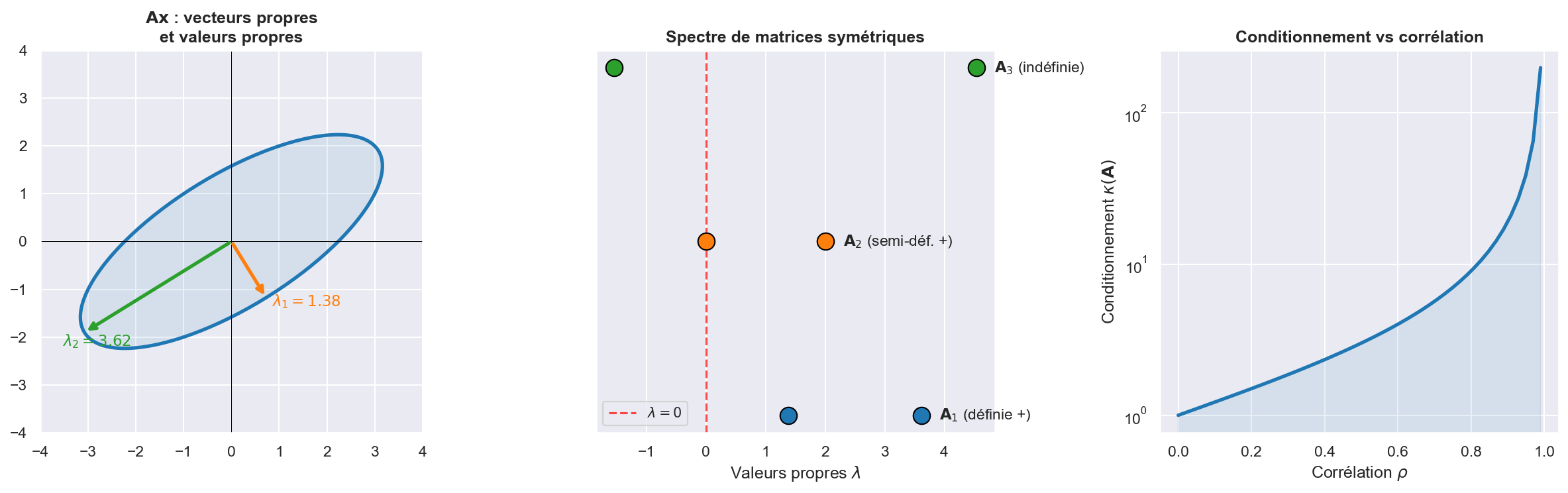
Figure 2 : Vecteurs propres d'une matrice symétrique, spectre et conditionnement
Conditionnement
Le nombre de conditionnement d'une matrice inversible est :
Un conditionnement élevé (
Projection orthogonale
Principe
La projection orthogonale de
La matrice
Propriétés :
(idempotente) (symétrique) - Le résidu
est orthogonal à :
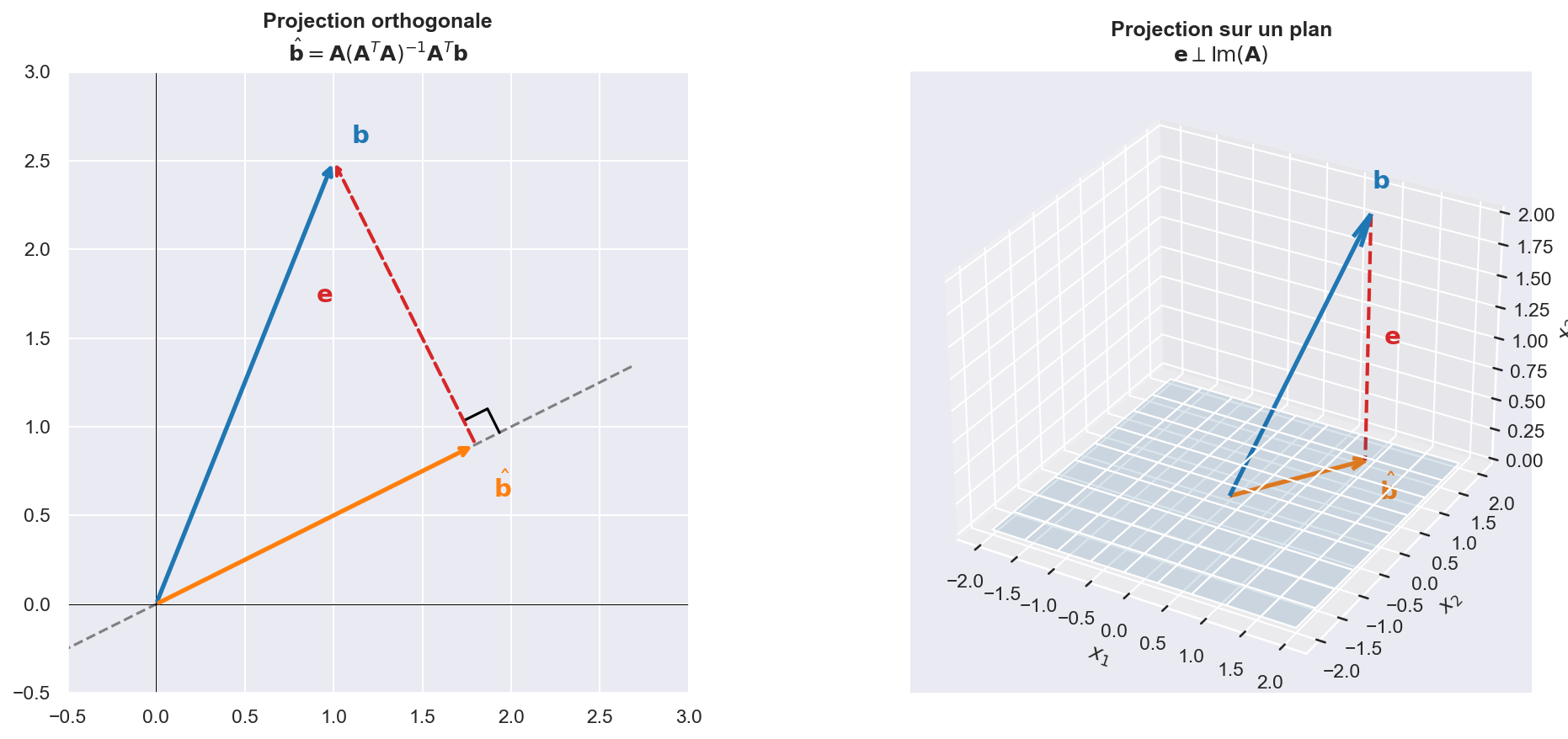
Figure 3 : Projection orthogonale sur une droite (2D) et sur un plan (3D)
Lien avec les moindres carrés
La solution au sens des moindres carrés du système sur-déterminé
C'est exactement le vecteur
Décomposition en valeurs singulières (SVD)
Définition
Toute matrice
où :
est orthogonale (vecteurs singuliers gauches) est diagonale avec (valeurs singulières) est orthogonale (vecteurs singuliers droits)
Géométriquement, la SVD décompose toute transformation linéaire en trois étapes : rotation, dilatation, rotation.
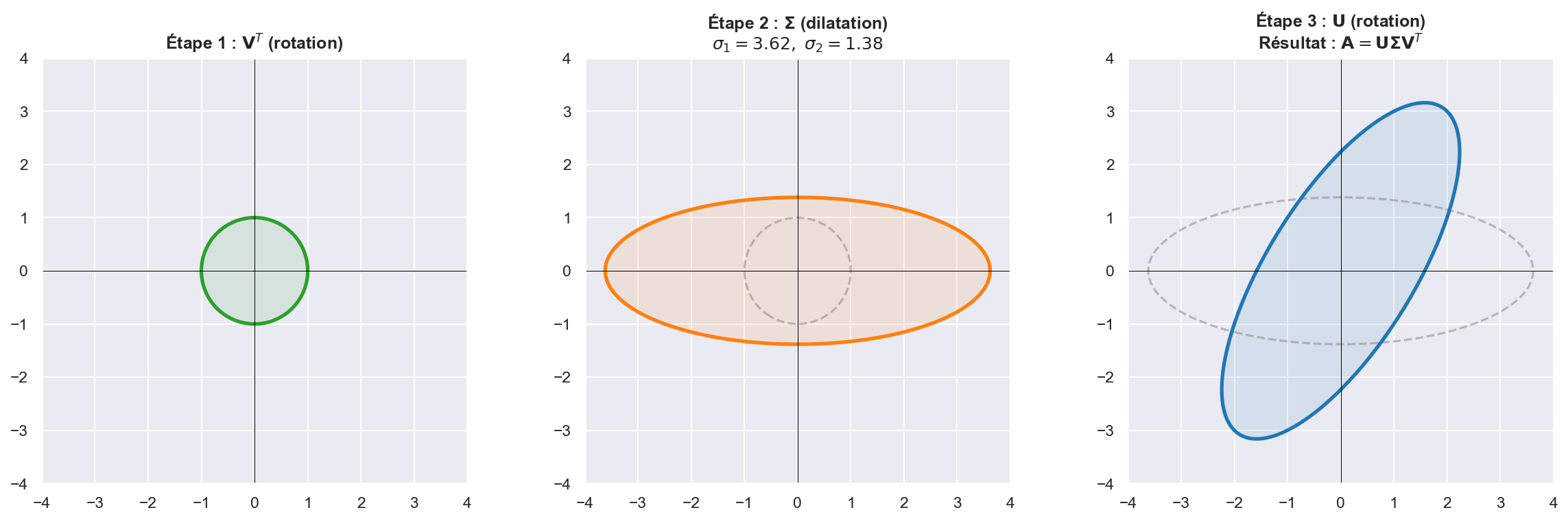
Figure 4 : Interprétation géométrique de la SVD : rotation → dilatation → rotation
Propriétés
- Le rang de
est le nombre de valeurs singulières non nulles - Les valeurs propres de
sont (norme de Frobenius) - La pseudo-inverse de Moore-Penrose est
Formes quadratiques et matrices définies positives
Forme quadratique
Une forme quadratique associée à une matrice symétrique
La nature de la forme quadratique dépend du signe des valeurs propres de
| Type | Condition | Valeurs propres |
|---|---|---|
| Définie positive | Toutes | |
| Semi-définie positive | Toutes | |
| Indéfinie | Positives et négatives |
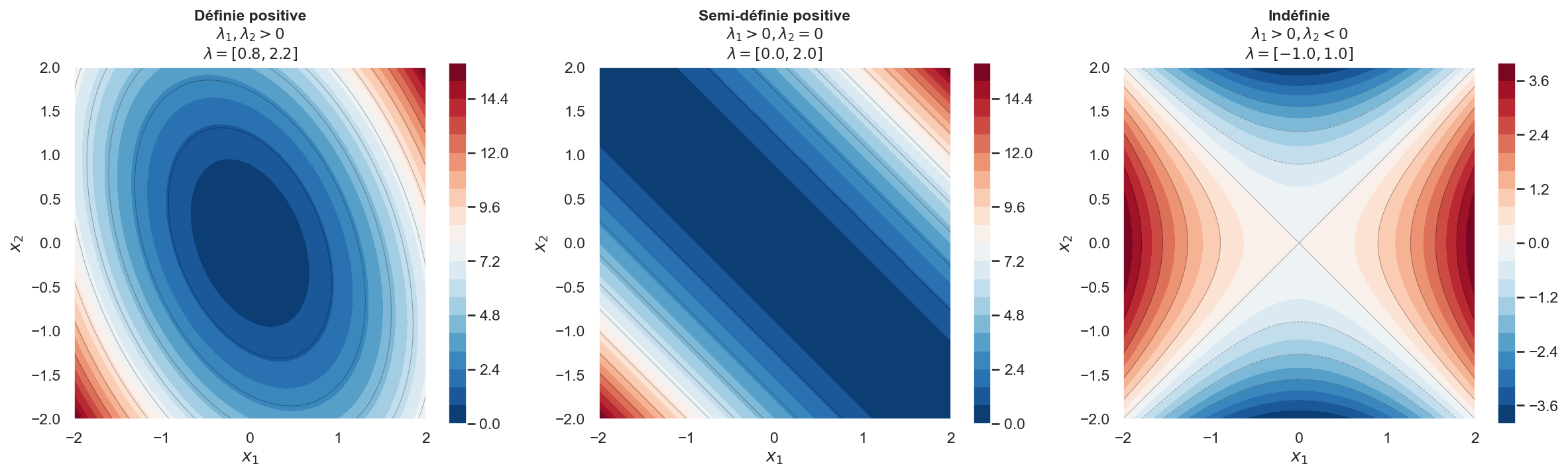
Figure 5 : Lignes de niveau de formes quadratiques selon la nature de la matrice
Matrices définies positives
Les matrices définies positives jouent un rôle central en estimation statistique :
- La matrice de covariance
est semi-définie positive - La matrice
est toujours semi-définie positive est définie positive si et seulement si est de rang plein
Propriétés : Si
est inversible est aussi définie positive - Il existe une unique matrice
définie positive telle que
Dérivation matricielle
Les dérivées matricielles sont essentielles pour l'optimisation en estimation et régression.
Gradient
Le gradient d'une fonction scalaire
Formules utiles
Pour
| Fonction | Gradient |
|---|---|
La dernière formule est directement utilisée pour dériver la solution des moindres carrés : en posant