Tutoriel : Estimation d'un canal FIR
Introduction
L'estimation de canal est un problème fondamental en traitement du signal et télécommunications. Un canal FIR (Finite Impulse Response) est un système linéaire caractérisé par sa réponse impulsionnelle
Dans ce tutoriel, nous considérons le problème d'identification de canal : estimer les coefficients
Modèle du canal
Le signal de sortie
où
Objectif : Estimer
- Signal d'entrée connu :
- Signal de sortie observé :
Formulation en modèle linéaire
Construction de la matrice de design
Pour
où
Chaque ligne
Remarque
Ce problème est dual de la déconvolution :
- Déconvolution :
connu, estimer à partir de - Estimation de canal :
connu, estimer à partir de
Estimateur des moindres carrés
Solution analytique
L'estimateur OLS minimise la somme des carrés des erreurs de prédiction :
Si
où
Propriétés
Sous les hypothèses du modèle linéaire gaussien :
Sans biais :
Matrice de covariance :
Variance minimale : BLUE (Best Linear Unbiased Estimator) par le théorème de Gauss-Markov
Conditionnement et qualité d'estimation
La qualité de l'estimation dépend du conditionnement de
- Si
est faible : estimation robuste - Si
est élevé : estimation sensible au bruit
Le conditionnement dépend du signal d'entrée
- Signal blanc (ex: bruit gaussien) : bon conditionnement, matrice
- Signal périodique (ex: sinusoïde pure) : mauvais conditionnement, matrice singulière
- Séquence d'apprentissage optimale : signaux pseudo-aléatoires (PN sequences, PRBS)
Visualisations
Le script Python génère trois figures illustrant le problème :
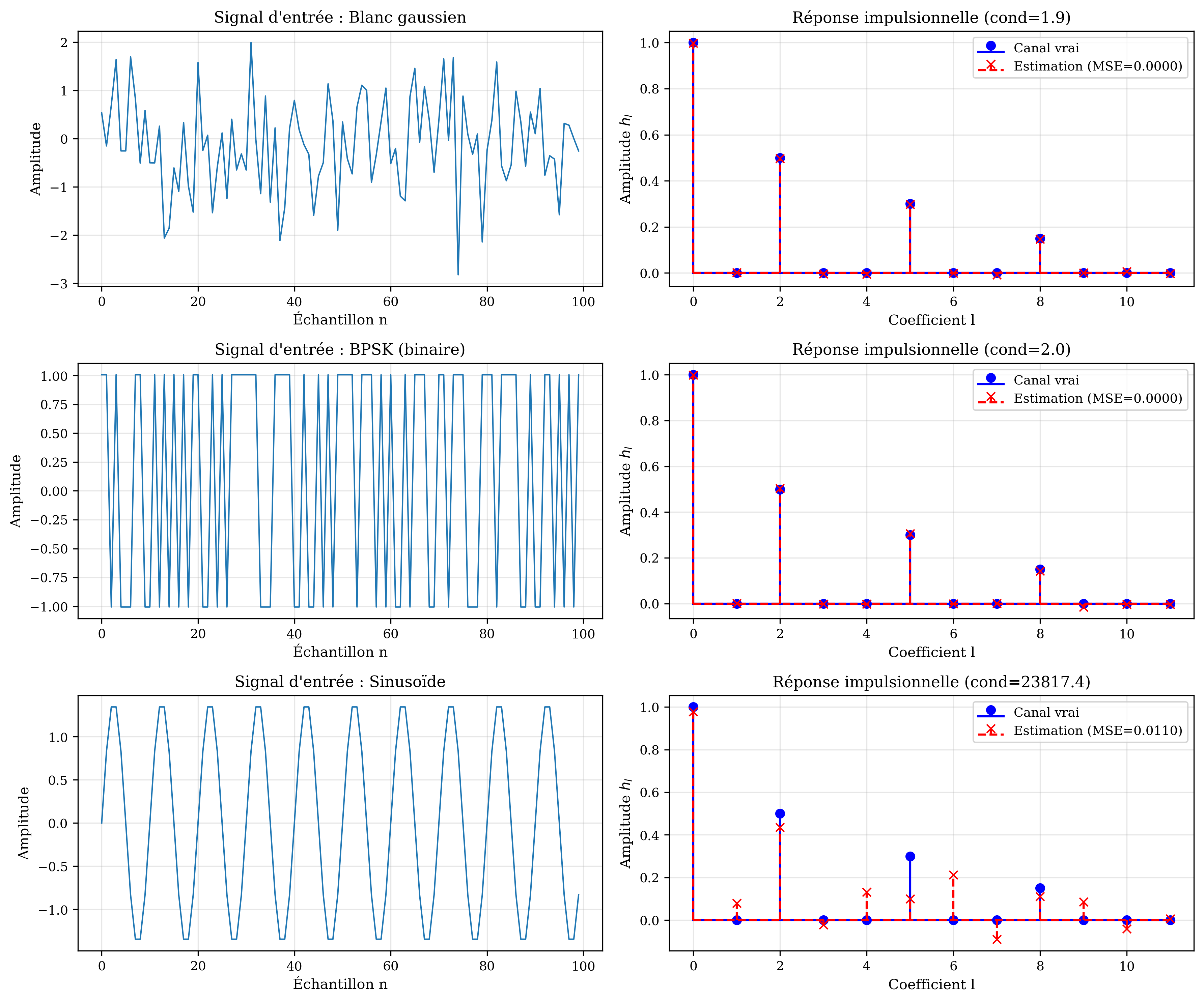
Figure 1: Estimation de canal avec différents types de signaux d'entrée
Figure 1 montre trois scénarios :
- Signal blanc gaussien : Excellente estimation (bon conditionnement)
- Signal BPSK : Bonne estimation (signal binaire aléatoire)
- Signal périodique : Mauvaise estimation (mauvais conditionnement)
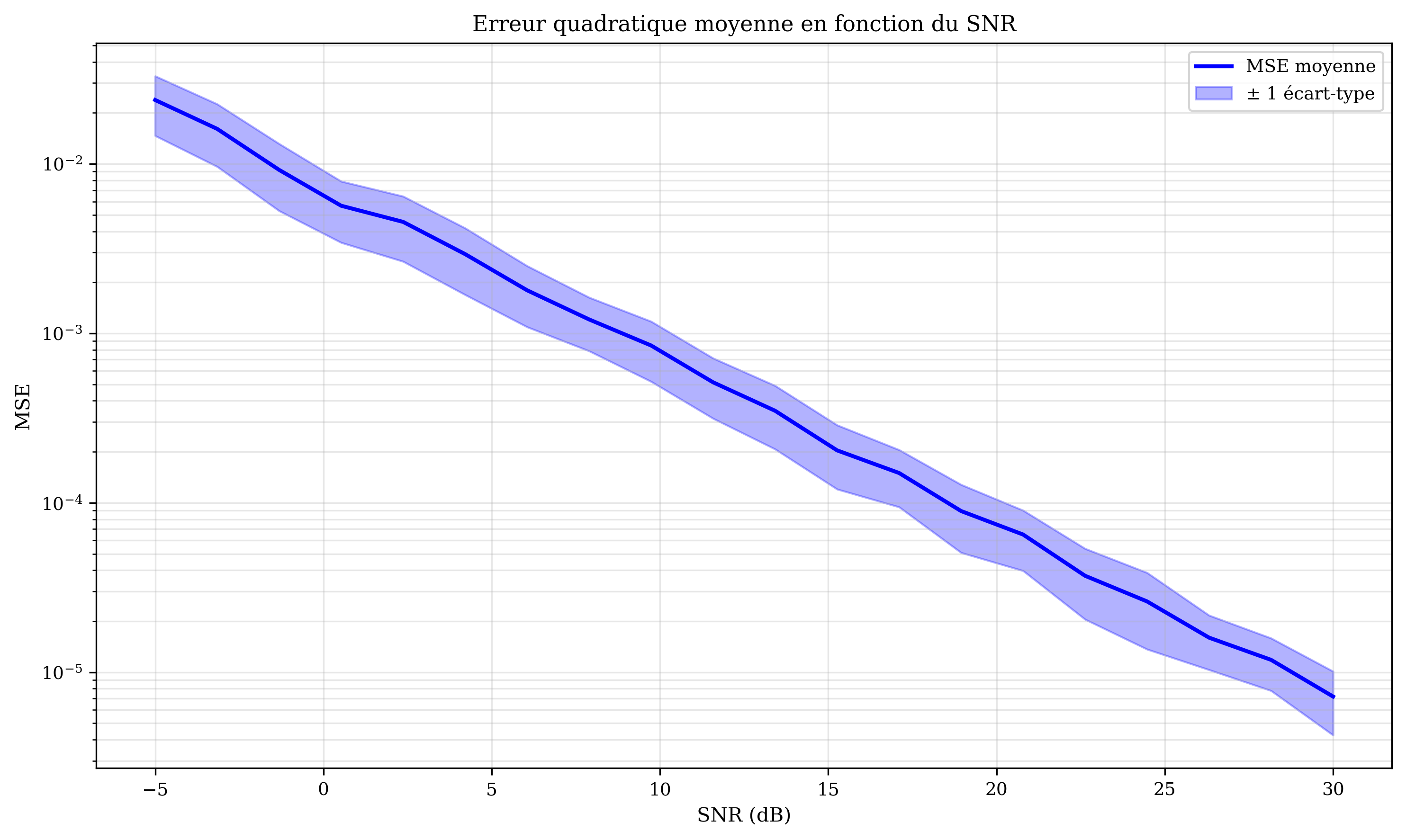
Figure 2: Erreur quadratique moyenne (MSE) en fonction du rapport signal/bruit (SNR)
Figure 2 illustre l'impact du bruit sur la qualité d'estimation :
- À SNR élevé (peu de bruit) : MSE faible, estimation précise
- À SNR faible (bruit important) : MSE élevée, estimation imprécise
- La pente montre la sensibilité de l'estimateur au bruit
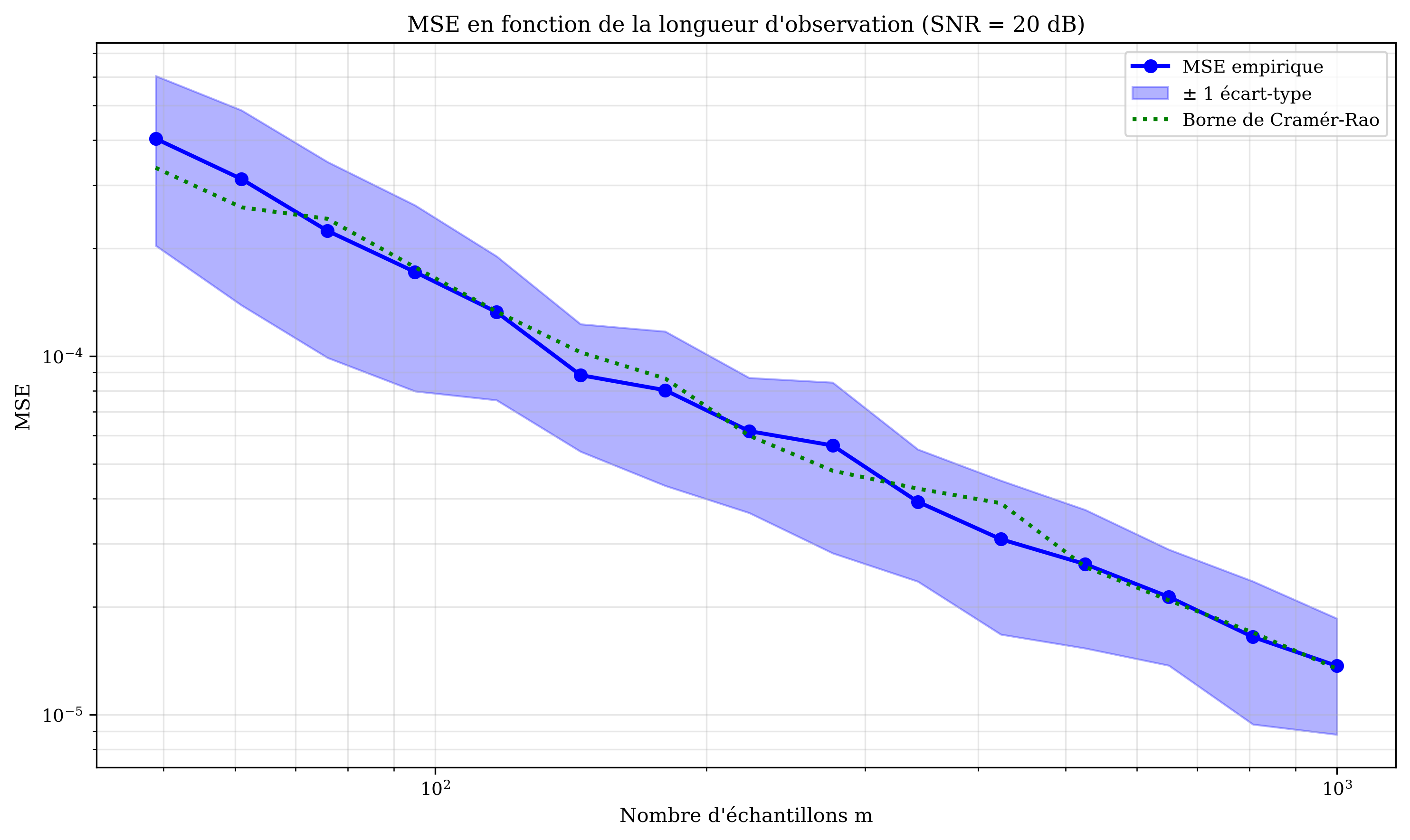
Figure 3: MSE en fonction du nombre d'échantillons d'observation
Figure 3 montre l'effet de la longueur de la séquence d'apprentissage :
- Plus d'échantillons → MSE diminue (loi en
) - Convergence asymptotique vers la vraie réponse impulsionnelle
Design optimal du signal d'entrée
Connaissant la matrice de covariance de l'estimateur, il peut être interessant de se focaliser sur le design du signal d'entrée en optimisation les performances d'estimation.
Formulation du problème
Pour la contrainte
La matrice de covariance de l'estimateur OLS est :
La trace de cette matrice représente la variance totale :
Problème d'optimisation (D-optimal design) :
Équivalent à :
Solution optimale
Le signal optimal est un bruit blanc (ou signal à spectre plat) :
Propriété : Pour un signal blanc
La matrice
Conséquence :
Ce qui donne la variance minimale possible.
Comparaison de différents signaux
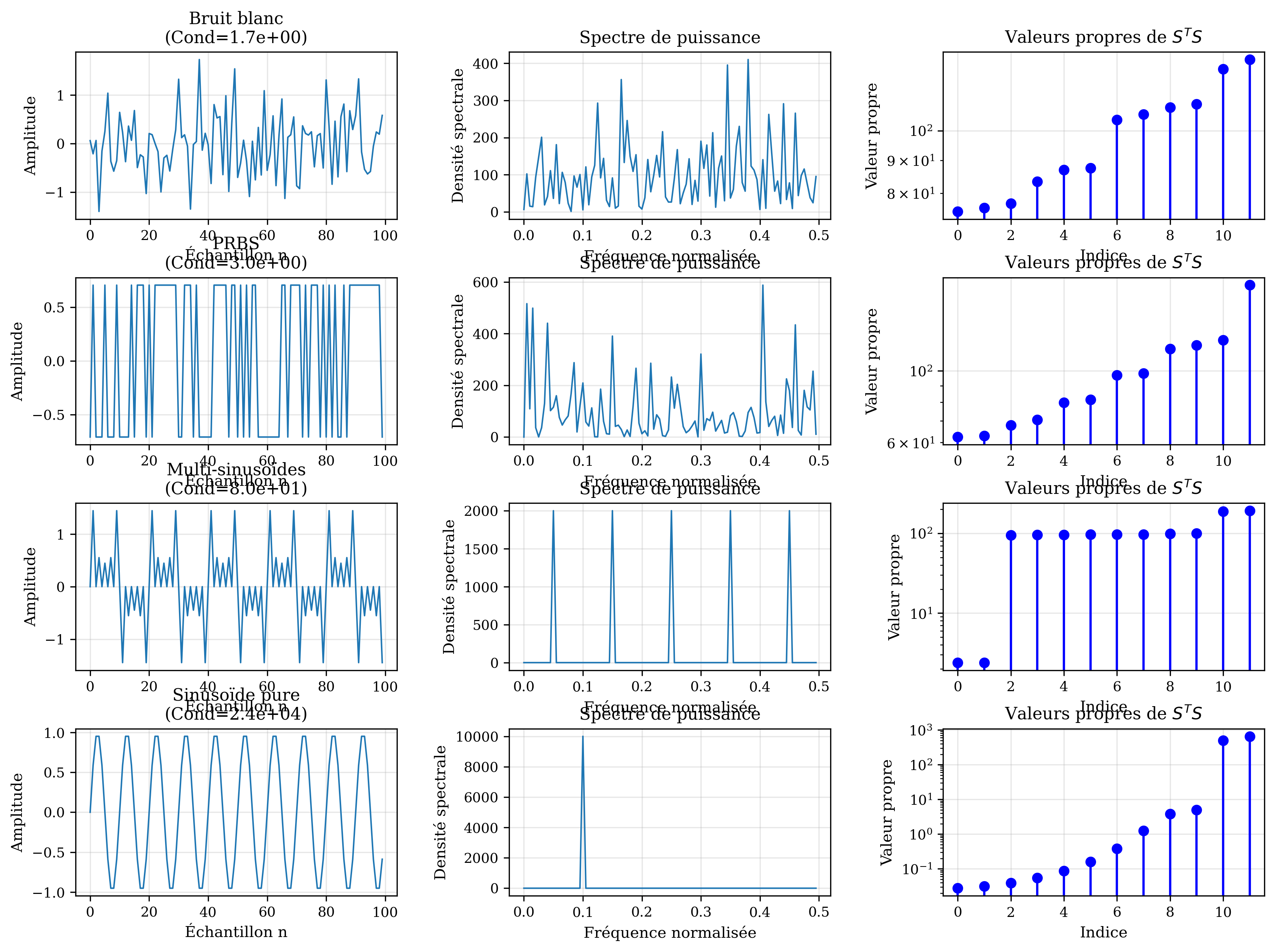
Figure 4: Comparaison de différents designs de signaux d'entrée
Figure 4 compare 4 types de signaux à énergie constante :
- Bruit blanc gaussien :
(optimal) - PRBS (Pseudo-Random Binary Sequence) :
(quasi-optimal) - Multi-sinusoïdes :
(acceptable si bien espacées) - Sinusoïde pure :
(mauvais, matrice singulière)
Spectre fréquentiel et valeurs propres
Le conditionnement de
- Spectre plat (bruit blanc) → Toutes les valeurs propres égales → Conditionnement optimal
- Spectre avec trous → Certaines valeurs propres faibles → Mauvais conditionnement
- Ligne spectrale unique → Une seule valeur propre non nulle → Matrice singulière
Recommandation pratique : Utiliser des séquences PRBS ou du bruit blanc gaussien filtré pour l'estimation de canal.
Code Python
Le script complet est disponible dans src/canal_estimation.py.